Soft Exosuit: 390g, 63% Less Shoulder Effort
Authors: Rui Chen, Domenico Chiaradia, Daniele Leonardis, Antonio Frisoli


Why It Matters
Anyone who has ever painted a ceiling, washed windows above their head, or spent hours working with raised arms knows: shoulders fatigue within minutes. Now imagine a painter, electrician, or surgeon — people whose arms spend most of the workday above shoulder level. Muscle fatigue, chronic pain, and rotator cuff injuries are their occupational reality.
Traditional shoulder exoskeletons have been around for a while, but they are essentially metal frameworks: heavy, bulky, and restrictive to natural movement. Wearing one feels like strapping on a backpack full of bricks while trying to help your arms.
A team of engineers from Scuola Superiore Sant’Anna (Pisa, Italy) proposed a radically different approach: a textile exosuit weighing just 390 grams that slips on like a shirt and, when inflated, reduces shoulder muscle load by up to 63,7%.
The Core Idea
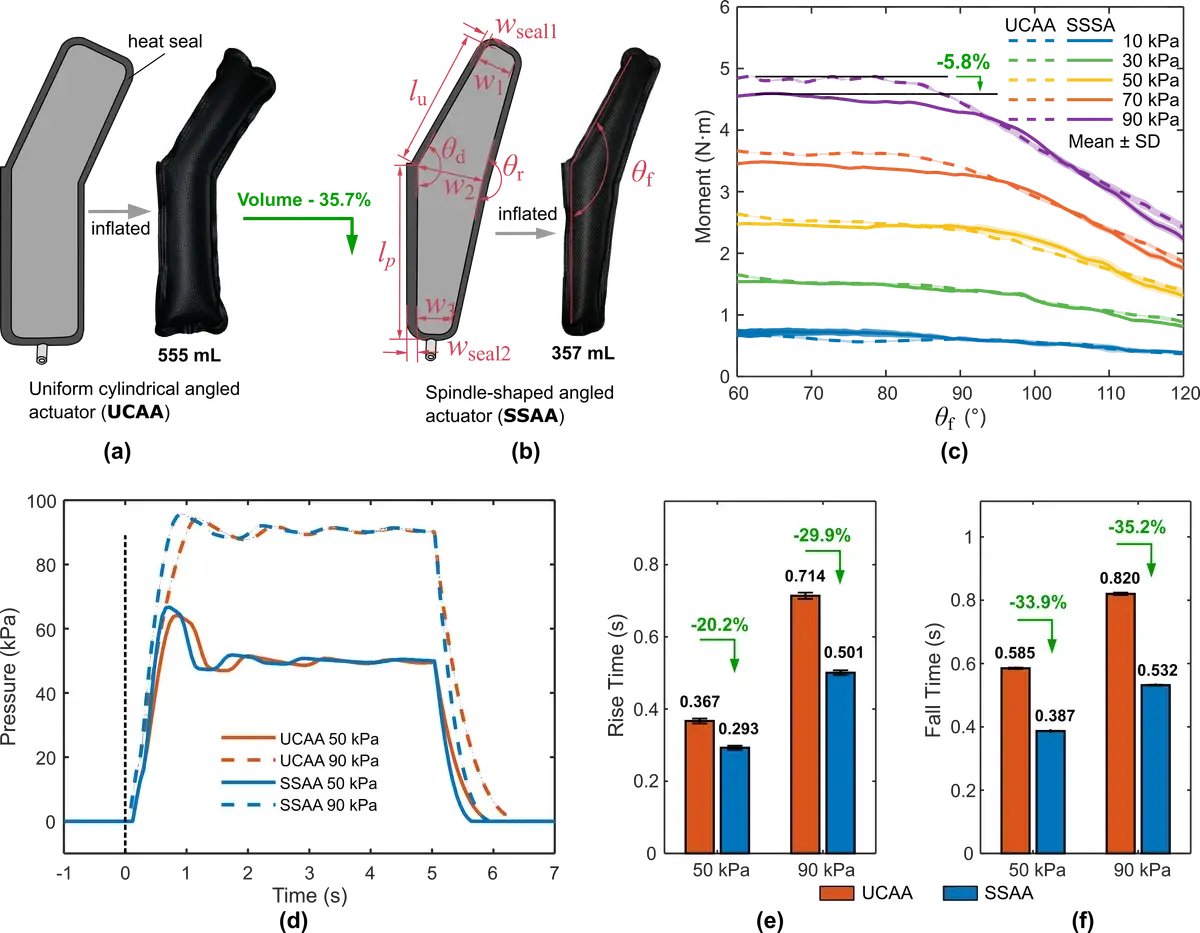
The fundamental problem with pneumatic (inflatable) actuators is straightforward: the more air you need to pump in, the slower they respond and the faster your portable tank runs dry. More volume = slower reaction. This is a classic engineering trade-off.
Pneumatic actuator — a soft device that changes shape and generates force when inflated with air. Unlike electric motors, pneumatics are inherently soft and safe for body contact.
The authors found an elegant solution: a spindle-shaped actuator geometry (Spindle-Shaped Angled Actuator, SSAA). The idea is simple — when a bending air chamber is inflated, the maximum load falls on the central section, decreasing toward the edges. So why make the actuator the same width throughout? By tapering the ends (like a spindle), you remove «idle» air volume that does not contribute to force output but only slows the system down.
The result: 35,7% less volume, 94,2% of original torque, 35,2% faster response.
Exosuit — a soft wearable robot made of textiles and flexible elements. Unlike a rigid exoskeleton, it does not restrict movement and weighs a fraction as much.
How It Works
The system consists of three components:
1. Curved Abduction Actuator (CAA). A Y-shaped chamber that wraps around the shoulder and helps lift the arm sideways when inflated. Built from two spindle-shaped modules connected by trapezoidal guide layers. Maximum torque: 9.7 Nm at 90 kPa. Survived 2,000+ inflation cycles with no degradation.
2. Horizontal Adduction Actuator (HAA). A flat pouch motor that pushes the arm forward when inflated. Two trapezoidal pouches generate up to 10.67 Nm of torque — enough to assist with forward arm raises.
3. Textile base. A half-shirt with Velcro fasteners that holds both actuators in place. Total weight: 390 grams. When deflated, the actuators collapse into thin fabric layers and are barely noticeable.

Torque (Nm) — a measure of rotational force. 9.7 Nm is roughly equivalent to hanging a 1 kg weight on a 1-meter lever arm. More than sufficient for supporting an outstretched arm.
Control is minimal: an ESP32 microcontroller, two proportional pressure regulators, and a portable compressor with a 24V lithium battery. No neural interfaces or complex algorithms — just set the pressure.
Results

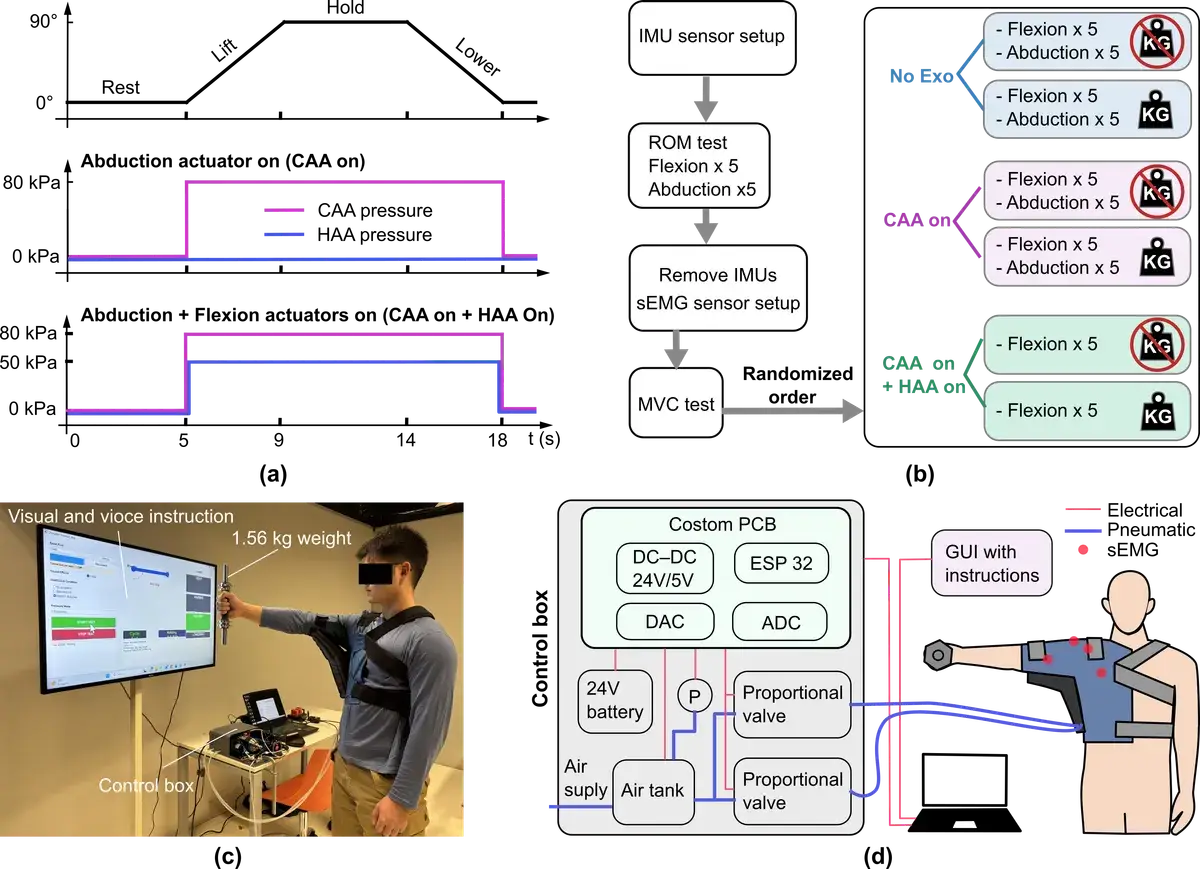
The study involved 10 healthy volunteers (5 male, 5 female, age 27.1 +/- 3.0 years). Electromyography (EMG) recorded activity from seven shoulder muscles during two types of movements.
EMG (electromyography) — a method for recording electrical muscle activity. The harder a muscle works, the higher the signal. A signal reduction means the muscle is being offloaded.
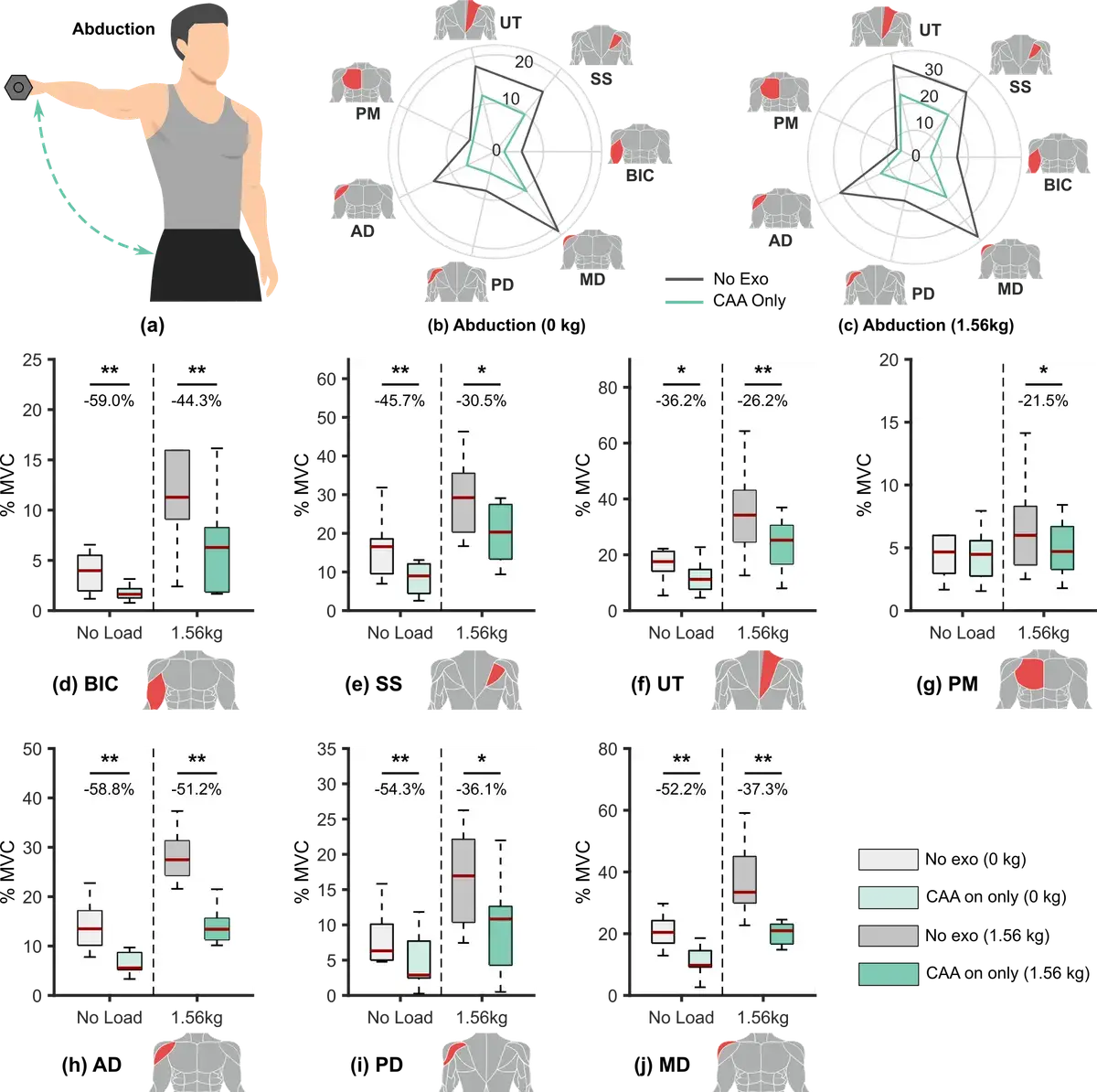
Arm Abduction (Raising Sideways)
With the CAA actuator at 80 kPa:
- Biceps brachii: 59% reduction (p=0.002)
- Anterior deltoid: ~50% reduction
- Supraspinatus: 45,7% reduction
- Upper trapezius: 36,2% reduction
Under load (1.56 kg weight), the effect persists though the magnitude of reduction decreases.

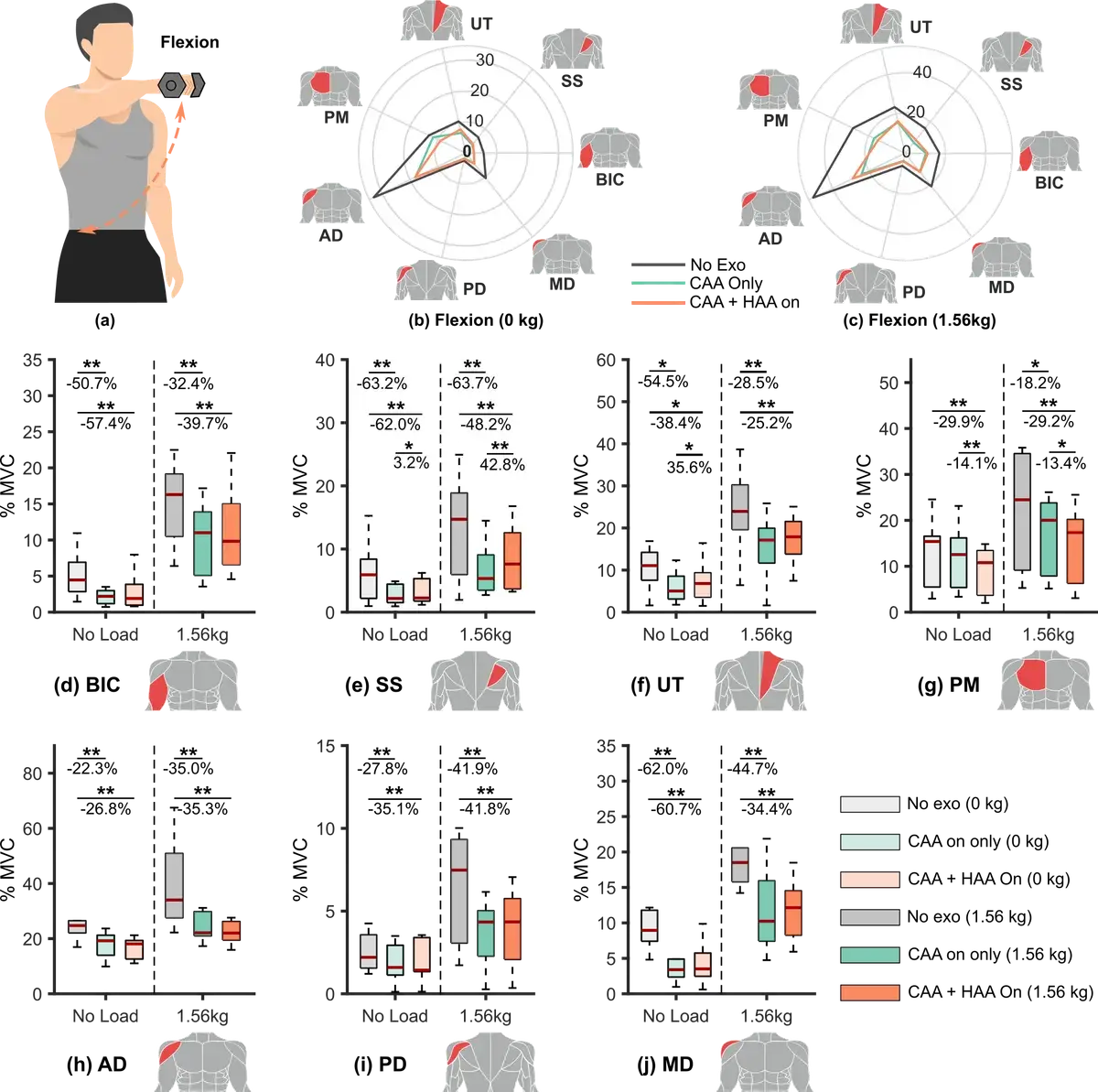
Arm Flexion (Raising Forward)
This is where the best results were achieved:
- Supraspinatus: 63,7% reduction (p=0.0039) — the highest in the study
- Middle deltoid: 62,0% reduction
- Biceps brachii: 57,4% reduction
- Upper trapezius: 54,5% reduction

Comfort and Range of Motion

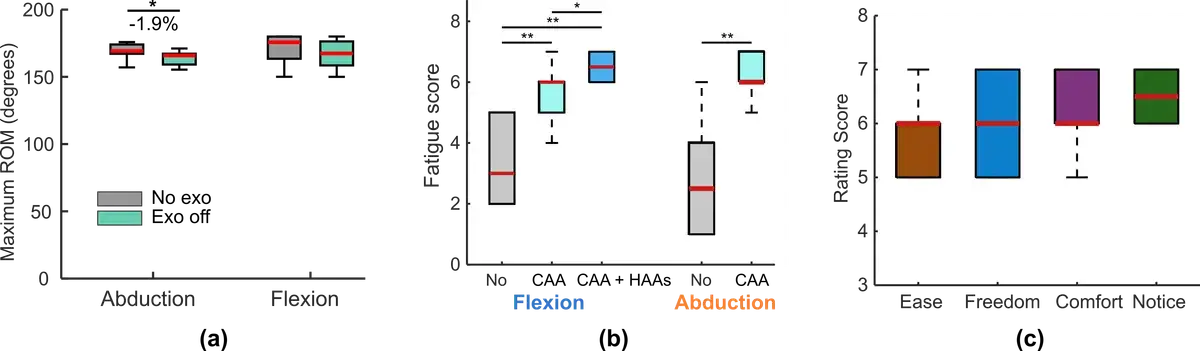
All participants rated the device highly:
- Ease of donning/doffing: 6 out of 7
- Freedom of movement: 6 out of 7
- Comfort: 6 out of 7
- Assistance effectiveness: 6.5 out of 7
Range of motion restriction: just 1,9% during abduction (statistically significant but practically negligible).
Critical Assessment
This is a preprint (arXiv) that has not yet undergone peer review. Findings should be interpreted with caution.
Strengths:
- Original engineering solution with spindle-shaped geometry — an elegant compromise between volume and power
- Impressive EMG reduction figures (up to 63,7%) from a device weighing just 390 g
- Real human participant study with detailed statistics (Wilcoxon signed-rank test, Cohen’s d)
Limitations:
- Tested only on healthy volunteers. Patients with movement disorders — the actual target audience — may respond very differently
- Dual-actuator configuration (CAA + HAA) did not show expected advantage over single actuator — healthy subjects compensated unfamiliar forces through muscular co-contraction
- Spindle geometry optimization is incomplete — no systematic parametric sweep was conducted
- Durability testing limited to 2,000 cycles — real-world deployment requires orders of magnitude more
Open questions:
- How will the exosuit perform in stroke patients — will compensatory muscle patterns subside?
- Is a fully autonomous version with portable compressor feasible for daily wear?
What Comes Next
Soft pneumatic exosuits sit at the intersection of several trends: aging populations, rising rates of occupational musculoskeletal disorders, and demand for home-based rehabilitation. According to reviews, most devices in this class are at TRL 3-5 (laboratory prototype to real-condition demonstration).
Next steps, according to the authors:
- Clinical trials with stroke patients and individuals with spinal cord injuries
- Actuator geometry optimization through automated parametric search
- Integration with EMG-triggered control for adaptive «assist-on-demand» mode
In a broader context: if a 390-gram textile shirt can offload more than half the strain from shoulder muscles, imagine a future where work clothing for painters, electricians, and surgeons literally helps them move. Not the iron exoskeleton of science fiction — but invisible support woven into everyday clothing.
Frequently Asked Questions
How does a soft exosuit differ from a traditional rigid exoskeleton?
A rigid exoskeleton is a metal frame with motors weighing 3 to 15 kg that restricts natural movement. A soft exosuit is made from textiles and flexible pneumatic chambers, weighs 390 g, and barely restricts motion. It does not replace joints — it «nudges» them in the right direction.
Is it safe to wear a pressurized device on the body?
Yes. Operating pressure is 80-90 kPa (less than 1 atmosphere) — about the force of a firm handshake. The chambers are made from durable TPU-coated nylon, and the system includes pressure relief valves. If power is lost, the actuators simply deflate.
Who could benefit from such an exosuit?
Potential users include stroke patients, people with spinal cord injuries, those with neuromuscular diseases (ALS), and workers who regularly raise their arms — painters, electricians, surgeons, and assembly line workers.
Can you wear the exosuit all day?
The current prototype is designed for laboratory sessions. Daily use would require solving issues of portable compressed air supply (compressors are still noisy and heavy), fabric durability through repeated washing, and individual anatomical fitting.
Why don’t two actuators work better than one?
In healthy individuals, the nervous system «resists» unfamiliar forces: stabilizer muscles (trapezius, supraspinatus) increase activity to compensate for the unexpected direction of assistance. In patients with impaired motor control, this effect should be weaker — which is exactly why the authors are planning clinical trials.
References
Related
Related Articles

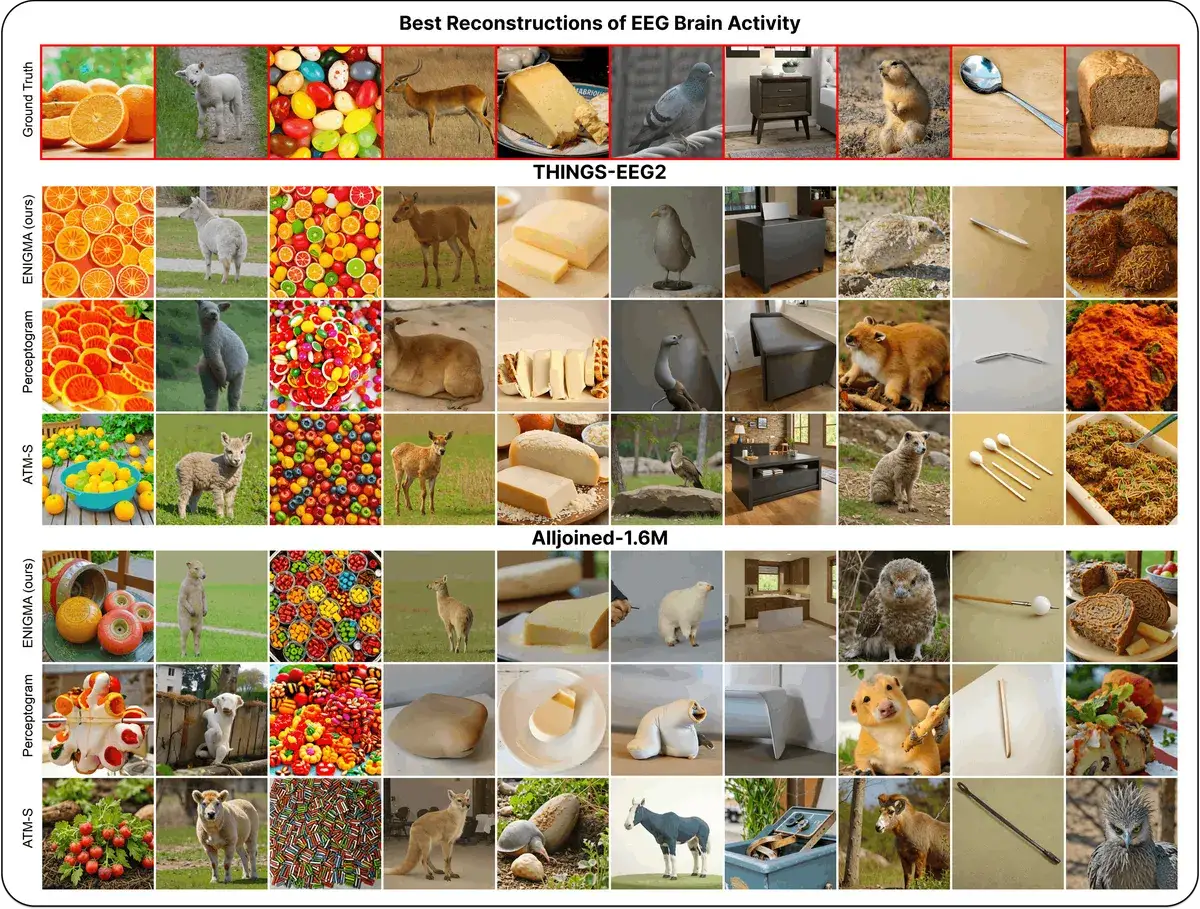
ENIGMA: Reading Minds in 15 Min via EEG
ENIGMA reconstructs images from EEG signals after 15 min of calibration, using under 1% of previous methods' parameters.


Spider Silk 5x Tougher Than Steel: Molecular Secret Cracked
Scientists decoded the exact molecular switch — arginine-tyrosine bonds — that turns liquid protein into spider silk, a thread 5x tougher than steel.

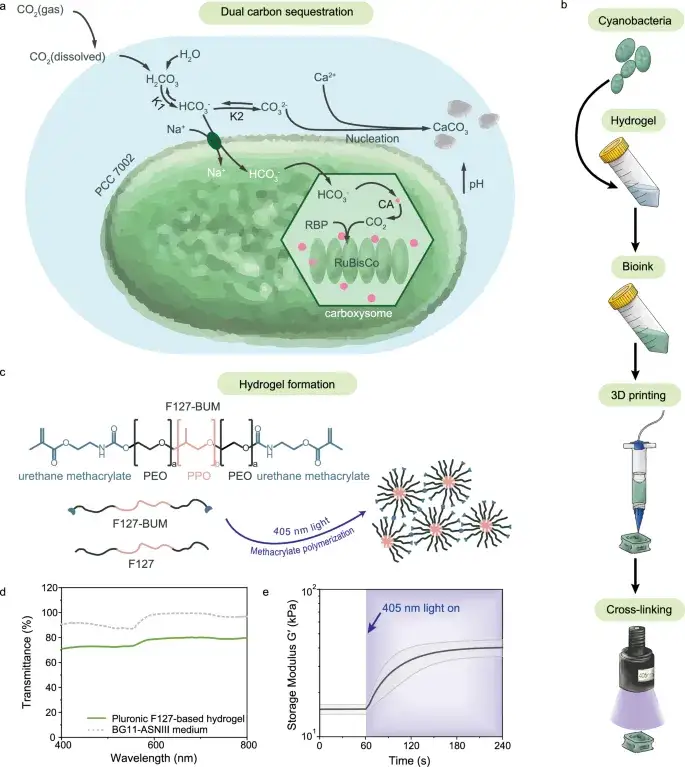
Bacteria Gel Captures CO₂ While Growing Stronger (2025)
ETH Zurich engineered a 3D-printable hydrogel packed with cyanobacteria. It absorbs CO₂ via photosynthesis and grows harder over time.